Obsah
1. Vzory Čiar na Ihrisku
sk.fiit.jim.agent.models.LinePatternRecognition
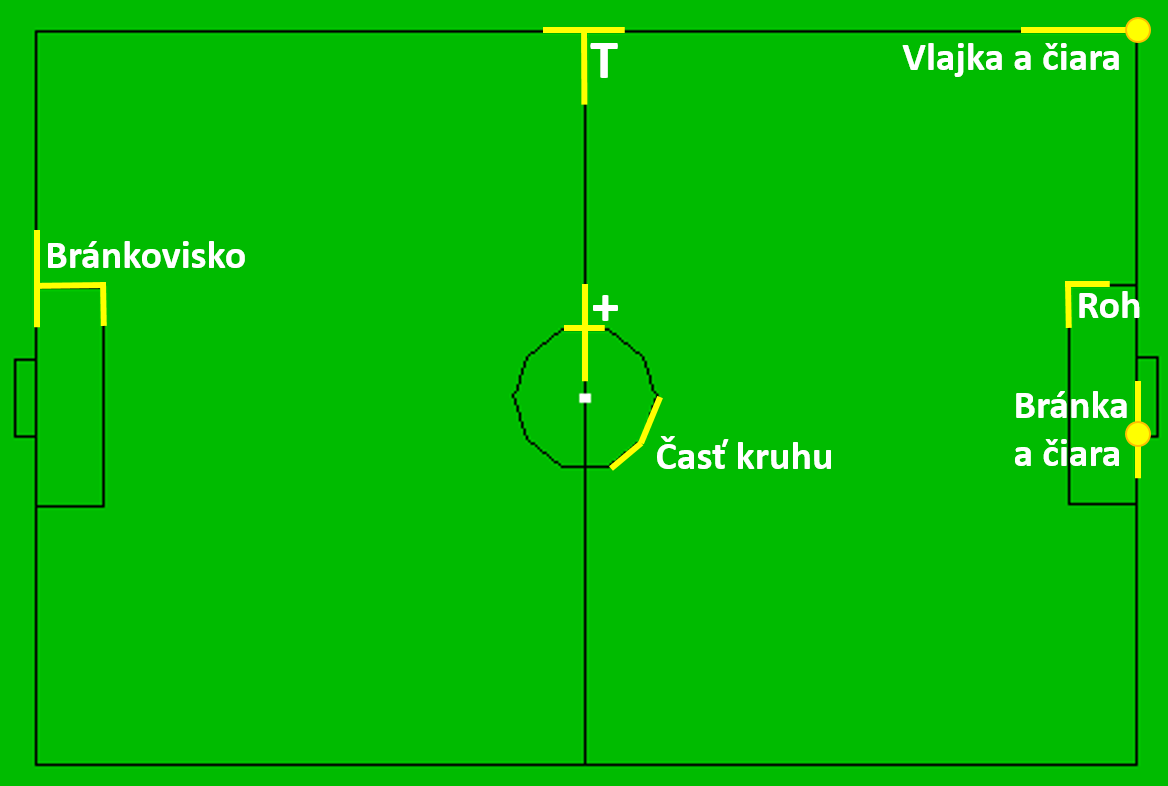
Obrázok1: Vzory čiar na ihrisku
LinePatternRecognition
Typ triedy: public abstract
Trieda zoskupuje funkcie na rozpoznávanie vzorov na ihrisku.
isIntersection (ešte neimplementované)
Typ: public static
Návratová hodnota: boolean
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
Funkcia zistí, či čiary predané ako parametre majú spoločný priesečník (T alebo +).
squareDistance
Typ: private static
Návratová hodnota: double
Parametre:
Vector3D a
Vector3D b
Vypočíta druhú mocninu vzdialenosti medzi bodmi.
isSamePoint
Typ: public static
Návratová hodnota: boolean
Parametre:
Vector3D a
Vector3D b
Zistí, či by body predané ako parameter mohli reprezentovať jeden bod. Najskôr sa vypočíta maximálna možná vzdialenosť od jedného bodu, do akej by sa mal nachádzať druhý bod, aby bolo možné povedať, že sa jedná o jeden a ten istý bod. Maximálna vzdialenosť je vzdialenosť medzi bodom a tým istým bodom otočeným o 4 stupne v oboch smeroch (horizontálne aj vertikálne), t.j. medzi bodom a = (r, phi, theta) a‘ = (r, phi + 4°, theta + 4°). 4° je maximálny možný rozdiel medzi bodmi (šum je z intervalu ).
haveSamePoint
Typ: public static
Návratová hodnota: byte
Parametre:
Vector3D point
ParsedLineWithFlags line
Vzor: „Vlajka a čiara“
Zistí, ktorý z bodov čiary môže byť totožný z bodom predaným ako argument.
Vráti:
- 0 ak žiaden z bodov čiary nemôže byť totožný
- 1 prvý bod z čiary a predaný bod ako argument môžu byť zhodné
- 2 druhý bod z čiary a predaný bod ako argument môžu byť zhodné
V prípade, ak oba body sa nachádzajú v tolerovanej vzdialenosti šumu, za totožný bod sa považuje bod čiary, ktorý je bližšie k danému bodu.
Bod čiary musí byť koncovým bodom danej čiary.
haveSamePoint
Typ: public static
Návratová hodnota: byte
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
Funkcia zistí, či dve čiary majú spoločný bod.
Vráti:
- 0 – nemajú spoločný bod
- 1 – prvý bod prvej čiary a prvý bod druhej čiary sú spoločným bodom
- 2 – prvý bod prvej čiary a druhý bod druhej čiary sú spoločným bodom
- 3 – druhý bod prvej čiary a prvý bod druhej čiary sú spoločným bodom
- 4 – druhý bod prvej čiary a druhý bod druhej čiary sú spoločným bodom
isCorner
Typ: public static
Návratová hodnota: byte
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
Vzor:„roh“
Funkcia zistí, či čiary predané ako parametre predstavujú roh.
Vráti:
- 0 – nie je
- 1 – prvý bod prvej čiary a prvý bod druhej čiary sú rohovým bodom
- 2 – prvý bod prvej čiary a druhý bod druhej čiary sú rohovým bodom
- 3 – druhý bod prvej čiary a prvý bod druhej čiary sú rohovým bodom
- 4 – druhý bod prvej čiary a druhý bod druhej čiary sú rohovým bodom
areCircleLines
Typ: public static
Návratová hodnota: byte
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
Vzor:„časť kruhu“
Funkcia zistí, či čiary predané ako parametre predstavujú roh.
Vráti:
- 0 – nie je
- 1 – prvý bod prvej čiary a prvý bod druhej čiary sú spoločným bodom
- 2 – prvý bod prvej čiary a druhý bod druhej čiary sú spoločným bodom
- 3 – druhý bod prvej čiary a prvý bod druhej čiary sú spoločným bodom
- 4 – druhý bod prvej čiary a druhý bod druhej čiary sú spoločným bodom
Poznámka:ak dve čiary majú spoločný koncový bod – môže sa jednať buď o roh alebo o časť kruhu. Pri rohu zvierajú čiary 90° uhol, pri časti kruhu to je 144°, ak je uhol menší ako 117° (v polovici medzi 90 a 144) → jedná sa o roh, inak ak je väčší ako 117° jedná sa o časť kruhu. 27° rozdiel je tolerancia spôsobená zašumením informácii o čiarach.
isT
(ešte neimplementované)
Typ: public static
Návratová hodnota: byte
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
Vzor: „T“
Zistí, či je medzi čiarami „T“ priesečník.
Vracia:
- 0 - nie je
- 1 – prvý bod prvej čiary je priesečníkom s druhou čiarou (prvý bod prvej čiary je zelený)
- 2 – druhý bod prvej čiary je priesečníkom s druhou čiarou
- 3 – prvý bod druhej čiary je priesečníkom s prvou čiarou
- 4 – druhý bod druhej čiary je priesečníkom s prvou čiarou
isPlus
(ešte neimplementované)
Typ: public static
Návratová hodnota: byte
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
Vzor: „+“
Vracia:
- 0 – nie je
- 1 – prvá čiara je stredovou čiarou
- 2 – druhá čiara je stredovou čiarou
Vzor + sa nachádza iba medzi stredovou čiarou a kruhom.
isGoalBox
(pre funkčnosť vyžaduje doimplementovanie funkcie isT)
Typ: public static
Návratová hodnota: byte[]
Parametre:
ParsedLineWithFlags line1
ParsedLineWithFlags line2
ParsedLineWithFlags line3
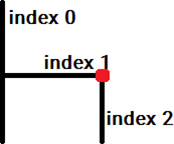
Zistí, či čiary formujú časť bránkoviska.
Vracia:
- null – nie
- pole troch hodnôt s usporiadaním čiar. Na indexe 0 je číslo čiary, ktorá je zadnou čiarou na indexe 1 je číslo bočnej čiary (záporné číslo, ak spoločný bod bočnej a prednej čiary bránkoviska (červený bod) je druhý bod danej čiary), na indexe 2 je číslo prednej čiary (záporné, ak spoločný bod je druhý bod čiary).
goalAndLine
Typ: public static
Návratová hodnota: boolean
Parametre:
Vector3D point
ParsedLineWithFlags line
Vzor:„Bránka a čiara“
Zistí, či daná čiara je v blízkosti bránky (s toleranciou odchýlky je možné, že funkcia vráti hodnotu „true“ aj pre nejakú z čiar bránkoviska).