Obsah
1. Jim
1.1. sk.fiit.jim.agent.models.AgentPositionCalculator
- Typ triedy: public
- Konštanty:
- private static final AgentModel agent = AgentModel.getInstance();
- informácia o stave agenta
- private static final int BAD_POSITION_KOEF = 1;
- koeficient zlej pozície agenta, ktorý sa používa pri regresii
- private static final int MAX_BAD_POSITIONS = 100;
- maximálny koeficient zlej pozície agenta
- private static final boolean USING_REGRESSION = false;
- konštanta, ktorá určuje, či sa bude používať regresia alebo nie
- private static final int MAX_LAST_POSITIONS = 21;
- konštanta, ktorá určuje maximálny počet zapamätaných predchádzajúcich pozícií
- Premenné:
- private static Logger LOG
- private static int badPositionCounter
- počítadlo pre zlé pozície
Táto trieda sa stará o aktualizovanie polohy agenta. Volá sa v triede „AgentModel“ pri každej novej správe zo serveru. Volá sa v metóde „processNewServerMessage“ a ako vstupný parameter dostáva „data“ typu „ParsedData“.
1.1.1. updatePosition
- Typ triedy: public static
- Návratová hodnota: void
- Parametre:
- ParsedData data
- parsované dáta zo serveru
Metóda slúži na nastavenie agentovej pozície. Ak agent nevidí žiadne fixné objekty, tak sa metóda ukončí. Inak sa prechádzajú všetky „flagy“ a následne podľa toho sa určí pozícia. V tejto metóde sa dá použiť aj regresia, ktorá využíva aj minulé pozície agenta.
1.1.2. regress
- Typ triedy: public static
- Návratová hodnota: void
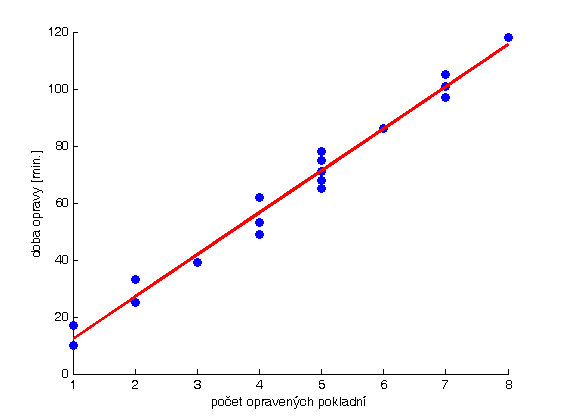
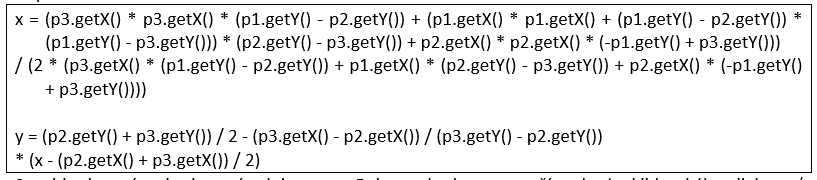
Táto metóda slúži na vypočítanie regresie. Regresia sa ráta v dvoch krokoch samostatne pre x-ovú súradnicu a následne pre y-ovú súradnicu.
1. krok:
Inicializacia:
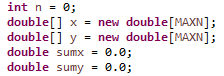
Počítanie:
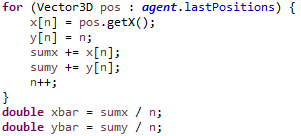 2. krok:
2. krok:
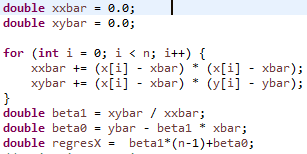 To iste sa vyráta aj pre y-ovú súradnicu a následne sa agentovi nastaví pozícia s vyrátanými parametrami.
To iste sa vyráta aj pre y-ovú súradnicu a následne sa agentovi nastaví pozícia s vyrátanými parametrami.
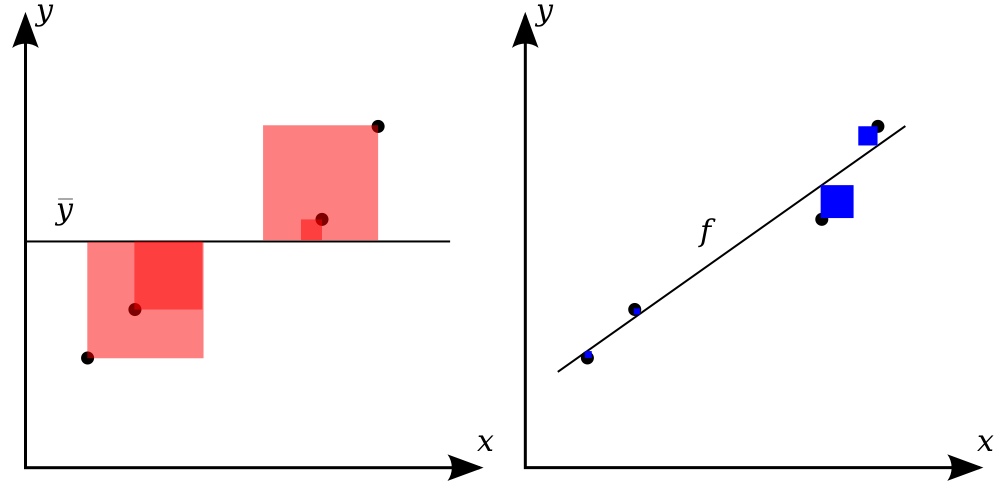
 Princíp regresie: regresia slúži na predpovedanie ďalšej hodnoty, ktorá je úzko spätá s predchádzajúcimi hodnotami. To znamená, ak mám nejaký zoznam hodnôt, určí sa priemer týchto hodnôt a ďalšia hodnota sa vyráta z priemernej hodnoty. Rátanie je rozdelené do menších štvorcov a snažíme sa v konečnom dôsledku dostať „nejakú priamku“ – trajektóriu pohybu hráča.
Princíp regresie: regresia slúži na predpovedanie ďalšej hodnoty, ktorá je úzko spätá s predchádzajúcimi hodnotami. To znamená, ak mám nejaký zoznam hodnôt, určí sa priemer týchto hodnôt a ďalšia hodnota sa vyráta z priemernej hodnoty. Rátanie je rozdelené do menších štvorcov a snažíme sa v konečnom dôsledku dostať „nejakú priamku“ – trajektóriu pohybu hráča.
 Odkazy:
Odkazy:
https://en.wikipedia.org/wiki/Coefficient_of_determination
http://www.ujfi.fei.stuba.sk/fyzika/navody/regresia-dodatok_20101022.pdf
1.2. sk.fiit.jim.agent.models.AgentRotationCalculator
- Konštanty:
- private static int FLAGS_TO_COMPUTE_ROTATION = 3
- Počet bodov potrebných pre výpočet otočenia agenta
- private AgentModel agent
- Informácie o aktuálnom stave agenta. (sk.fiit.jim.agent.models.AgentModel)
Trieda je (aspoň by mala byť) určená na výpočet otočenia agenta na základe pevných bodov. Rotácia sa počíta na základe troch bodov.
1.2.1. Konštruktor
- Typ:public
- Parametre:
- AgentModel agent
- Aktuálny stav agenta
Vytvorí objekt a nastaví hodnotu konštanty agent na predaný parameter.
1.2.2. updateRotations
- Typ:public
- Parametre:
- ParsedData data
Táto metóda aktualizuje rotáciu agenta v aktuálnom AgentModel na základe dát zo servera.Rotácia sa vykoná, ak z jednej strany (sameSideFlags) agent vidi minimálne 3 vlajky. Vytvoria sa a naplnia sa 2 zoznamy pozícií vlajok (globálnych a vnímaných agentom), a pošlú sa ako argument do následne zavolanej metóde calculateRotation.
1.2.3. getFlagsOfSideWithMoreFlagsSeen
- Typ:private
- Návratová hodnota:Map<Vector3D, Vector3D>
- Parametre:
- Map<FixedObject, Vector3D> fixedObjects
- Videné kontrolné body nemapované na ich globálne súradnice (kľúčom sú globálne hodnoty).
Funkcia vracia vlajky zo strany, na ktorej je ich viac. Vlajky sú rozdelené do dvoch strán („our“ – ľavá strana ihriska/ záporná x-ová súradnica a their – pravá strana ihriska / kladná x-ová súradnica). Ak agent vidí menej ako FLAGS_TO_COMPUTE_ROTATION (3) bodov, vráti sa prázdna mapa, inak sa vráti mapa s hodnotami strany, kde je viac videných bodov. Kľúčom je opäť reálna pozícia vlajky.
1.2.4. calculateRotation
- Typ: private
- Parametre:
- List<Vector3D> absolute
- zoznam absolútnych pozícií vlajok
- List<Vector3D> seen
- zoznam vnímaných agentom pozícií vlajok
Vypočíta rotáciu agenta na základe 3 vlajok, ktoré vidí agent. Usporiadajú sa hodnoty absolútnych pozícii vlajok pomocou metódy orderToFormAxes(absolute).
Hodnoty y1,y2 a z1 sa nastavia na základe zoradenia pomocou metódy orderToFormAxes
y1,y2 sa používajú na vytvorenie Y-ovej osí
z1, z2 sa používajú na vytvorenie Z-ovej osí
double rotationX - natočenie agenta v závislosti od osi X
double rotationY - natočenie agenta v závislosti od osi Y
double rotationZ - natočenie agenta v závislosti od osi Z
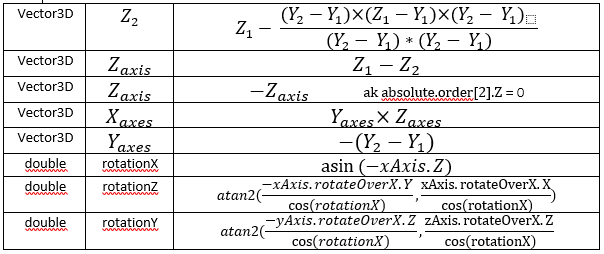 Uhol rotácie musí patriť intervalu (0, 2π), čo sa dosahuje pomocou metódy normalize.
Uhol rotácie musí patriť intervalu (0, 2π), čo sa dosahuje pomocou metódy normalize.
1.2.5. orderToFormAxes
- Typ:private
- Návratová hodnota:int[]
- Parametre:
- List<Vector3D> absolute
Metóda vracia pole troch hodnôt. Určí, ktoré dva body sa použijú na vytvorenie y-ovej (nultá a prvá hodnota poľa) osi a ktorý bod bude použitý na vytvorenie z-tovej osy (kolmej na y-ovú).
 * Podmienky sa vyhodnocujú v poradí, v akom sú uvedené (zhora na dol), vracia sa prvá zhoda.
* Podmienky sa vyhodnocujú v poradí, v akom sú uvedené (zhora na dol), vracia sa prvá zhoda.
1.3. sk.fiit.jim.agent.models.FixedObject
- Typ:public enum
- Hodnoty:
- OUR_LOWER_CORNER
- OUR_UPPER_CORNER
- OUR_UPPER_POST
- OUR_LOWER_POST
- THEIR_UPPER_CORNER
- THEIR_LOWER_CORNER
- THEIR_UPPER_POST
- THEIR_LOWER_POST
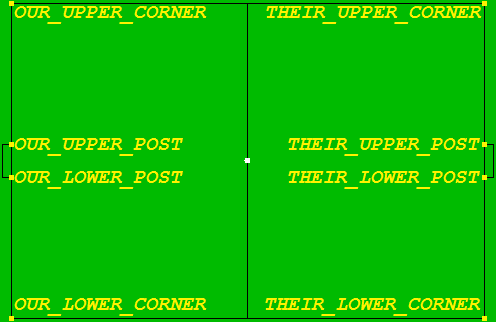
Mapovanie hodnôt (objektov) FixedObject na kontrolne body ihriska
1.3.1. positions_0_6_7, positions_0_6_5, positions_0_6_2
- Typ:private static
- Návratová hodnota: Map<FixedObject, Vector3D>
Metódy, ktoré vytvoria mapu kontrolných bodov so súradnicami v závislosti od verzie serveru (volanej funkcie)
1.3.2. namesInServerMessages
- Typ:private static
- Návratová hodnota: Map<String, FixedObject >
Mapovanie správ zo servera (s-výrazov) na objekty typu FixedObject
1.3.3. fromServerId
- Typ:public static
- Návratová hodnota: FixedObject
- Parametre:
- String id
- ID kontrolného bodu v notácii servera (typ s-výrazu)
Vráti objekt požadovaného kontrolného bodu.
1.4. sk.fiit.jim.agent.parsing.ParsedData
- Typ triedy: public
- Premenné:
- public double SIMULATION_TIME
- čas od spustenia servera
- public double GAME_TIME
- čas behu hry
- public Integer PLAYER_ID
- id agenta
- public Boolean OUR_SIDE_IS_LEFT
- strana ihriska, na ktorej hrá agent
- public EnvironmentModel.PlayMode playMode
- public Map<Joint, Double> agentsJoints
- public Vector3D gyroscope
- informácia z gyroskopu
- public Vector3D accelerometer
- informácia z accelerometru
- public ForceReceptor forceReceptor
- public Vector3D ballRelativePosition
- public Map<FixedObject, Vector3D> fixedObjects
- public List<PlayerData> otherplayers
- public List <ParsedLineWithFlags> lines
- zoznam čiar v poradí, v ktorom ich dostáva agent zo servera
- public Boolean bumper
- public HearReceptor hearReceptor
Trieda je určená na uchovávanie informácii získaných zo správ zo servera.
2. RoboCupLibrary
2.1. sk.fiit.robocup.library.geometry.Angles
- Typ triedy:public final
- Premenné:
- private double from
- určuje koniec intervalu uhlov (v radiánoch) - východzia hodnota = 0.0
- private double to
- určuje koniec intervalu uhlov (v radiánoch) - východzia hodnota = 0.0
Táto trieda poskytuje funkcie na prácu s uhlami. Reprezentuje interval medzi 2 uhlami. Tie sú pôvodne v radiánoch, no dajú sa previesť na stupne pomocou metódy setDegree(). Obsahuje 2 konštruktory, jeden prázdny a jeden s parametrami double from a double to, ktorý priradí lokálnym rovnomenným premenným hodnoty uhlov v stupňoch.
2.1.1. setRadian
- Typ metódy:public
- Návratová hodnota:void
- Parametre:
- double from
- double to
- uhly (v radiánoch) určujúce interval uhlov
Táto metóda priradí lokálnym rovnomenným premenným hodnoty uhlov v radiánoch.
2.1.2. setDegree
- Typ metódy:public
- Návratová hodnota:void
- Parametre:
- double from
- double to
- uhly (v radiánoch) určujúce interval uhlov
Táto metóda priradí lokálnym rovnomenným premenným hodnoty uhlov v stupňoch.
Použitý matematický výpočet: uholvstupňoch=uholvradiánoch/ 180 * π
2.1.3. include
- Typ metódy:public
- Návratová hodnota:boolean
- Parametre:
- double include_angle
Táto metóda vráti hodnotu true, ak sa vstupný parameter nachádza v intervale (from, to). Ak nie, vráti hodnotu false.
2.1.4. angleDiff
- Typ metódy:public static
- Návratová hodnota: double
- Parametre:
- double first
- double second
Táto metóda vráti menšiu hodnotu z normalizovaných rozdielov (z intervalu <0; 2π>) vstupných parametrov v radiánoch.
2.1.5. angleDiffInDeg
- Typ metódy:public static
- Návratová hodnota: double
- Parametre:
- double first
- double second
Táto metóda vráti menšiu hodnotu z normalizovaných rozdielov vstupných parametrov v stupňoch.
2.1.6. normalize
- Typ metódy:public static
- Návratová hodnota: double
- Parametre:
- double angle
Táto metóda vráti uhol v normalizovanej forme, t.j. v intervale <0; 2π>. Ak je vstupný uhol už v tomto intervale, tak sa vráti nezmenený. Ak nie, vypočíta sa takýmto spôsobom:
closest = angle - (2π * (angle / 2π))Ak je vypočítaná hodnota menšia ako nula, pripočíta sa k nej hodnota 2π a vráti sa. Ak nie je, tak sa rovno vráti.
2.2. sk.fiit.robocup.library.geometry.Circle
- Typ triedy:public final
- Premenné:
- private Point2D center
- reprezentuje stred kruhu ako bod v dvojrozmernom priestore
- private double radius
- reprezentuje polomer kruhu
Táto trieda reprezentuje kruh ako matematický 2D útvar. Obsahuje 2 konštruktory, jeden bez parametrov, ktorý vytvorí kruh so stredom so súradnicami [0;0] a polomerom 0. Druhý, s parametrami Point2D center, double radius vytvorí kruh ako objekt s danými parametrami.
2.2.1. getCenter
- Typ metódy:public
- Návratová hodnota:Point2D
Metóda vráti stred kruhu.
2.2.2. getRadius
- Typ metódy:public
- Návratová hodnota:double
Metóda vráti polomer kruhu.
2.2.3. toString
- Typ metódy:public
- Návratová hodnota:String
Metóda preťažuje klasickú metódu toString vo formáte „Circle [center=“ center „, radius=“ radius „]“, kde center je stred kruhu a radius je jeho polomer.
2.3. sk.fiit.robocup.library.geometry.Line2D
- Typ triedy:public
- Premenné:
- private double x1
- reprezentuje x-ovú súradnicu prvého bodu čiary
- private double x2
- reprezentuje x-ovú súradnicu prvého bodu čiary
- private double y1
- reprezentuje y-ovú súradnicu druhého bodu čiary
- private double y2
- reprezentuje y-ovú súradnicu druhého bodu čiary
- private double a
- reprezentuje koeficient a z rovnice priamky ax by c = 0
- private double b
- reprezentuje koeficient b z rovnice priamky ax by c = 0
- private double c
- reprezentuje koeficient c z rovnice priamky ax by c = 0
- private double nx
- reprezentuje x-ovú súradnicu normálového vektoru (kolmého na čiaru)
- private double ny
- reprezentuje y-ovú súradnicu normálového vektoru (kolmého na čiaru)
- private double kx
- reprezentuje x-ovú súradnicu smerového vektoru
- private double ky
- reprezentuje y-ovú súradnicu smerového vektoru
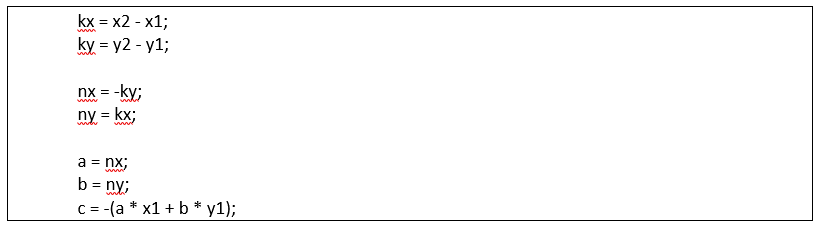
Táto trieda reprezentuje čiaru ako matematický 2D útvar. Obsahuje 2 konštruktory, kde na vytvorenie čiary použijeme buď 2 body (ich x a y súradnice), alebo 1 bod a smerový vektor. Sú tu použité základné matematické výpočty pre výpočet smerového vektoru a normálového vektoru a nakoniec aj samotných koeficientov a, b a c.
2.3.1. getNormalVector
- Typ metódy:public
- Návratová hodnota:Point2D
Metóda vráti normálový vektor ako 2D bod.
2.3.2. solveGeneralEqation
- Typ metódy:public
- Návratová hodnota:double
- Parametre:
- double x
- double y
Metóda vráti výsledok rovnice a*x b*yc.
2.3.3. getCircleIntersection
- Typ metódy:public
- Návratová hodnota:List<Point2D>
- Parametre:
- Circle c
Metóda vráti zoznam bodov danej priamky, ktoré pretínajú kruh zo vstupného parametru. Najprv sa vypočíta euklidovská vzdialenosť medzi 2 bodmi čiary ako odmocnina zo súčtu druhých mocnín ich rozdielov x a y súradníc. Matematicky je to vyjadrené takto:
 Následne sa vypočíta smerový vektor D z bodu A do bodu B.
Následne sa vypočíta smerový vektor D z bodu A do bodu B.
 Potom sa počíta t, čo je najbližší bod čiary od stredu kruhu, vypočíta sa takto:
Potom sa počíta t, čo je najbližší bod čiary od stredu kruhu, vypočíta sa takto:
 Takto sa môže vypočítať bod E, ktorý leží na čiare a je najbližšie ku kruhu.
Takto sa môže vypočítať bod E, ktorý leží na čiare a je najbližšie ku kruhu.
 Ďalej sa vypočíta euklidovská vzdialenosť LEC bodu E od kruhu (podobne ako pri LAB). Ak je táto vzdialenosť menšia ako polomer kruhu, tak sa vypočítajú 2 priesečníky čiary s kruhom. Najprv sa vypočíta dt, čo je (euklidovská) vzdialenosť t od prieniku čiary a kruhu. Potom sa počítajú spomínané priesečníky F a G.
Ďalej sa vypočíta euklidovská vzdialenosť LEC bodu E od kruhu (podobne ako pri LAB). Ak je táto vzdialenosť menšia ako polomer kruhu, tak sa vypočítajú 2 priesečníky čiary s kruhom. Najprv sa vypočíta dt, čo je (euklidovská) vzdialenosť t od prieniku čiary a kruhu. Potom sa počítajú spomínané priesečníky F a G.
 Nakoniec sa tieto 2 body pridajú do zoznamu, ktorý sa vráti. Ak vzdialenosť nebola menšia ako polomer kruhu, ale rovná, tým pádom je čiara dotyčnica ku kruhu a vráti sa zoznam obsahujúci len bod E. V iných prípadoch sa vráti prázdny zoznam.
Nakoniec sa tieto 2 body pridajú do zoznamu, ktorý sa vráti. Ak vzdialenosť nebola menšia ako polomer kruhu, ale rovná, tým pádom je čiara dotyčnica ku kruhu a vráti sa zoznam obsahujúci len bod E. V iných prípadoch sa vráti prázdny zoznam.
2.3.4. toString
- Typ metódy:public
- Návratová hodnota:String
Metóda preťažuje klasickú metódu toString vo formáte „ Line2D [x1=“ x1 „, y1=“ y1 „, x2=“ x2 „, y2=“ y2 „, a=“ a „, b=“ b „, c=“ c „, nx=“ nx „, ny=“ ny „, kx=“ kx „, ky=“ ky „]“, kde sa využívajú lokálne premenné popísané v časti 1.3.
2.3.5. gettre
- Typ metódy:public
- Návratová hodnota:double
V triede sa nachádzajú metódy pre prístup ku všetkým lokálnym premenným (x1, y1, x2, y2, a, b, c, nx, ny, kx, ky).
2.4. sk.fiit.robocup.library.geometry.MEC
- Typ triedy:public
Táto trieda slúži na počítanie najmenšieho ohraničujúceho kruhu (angl. Minimal Enclosing Circle) z daných bodov.
2.4.1. minEnclosingCircle
- Typ metódy:public static
- Návratová hodnota:Circle
- Parametre:List<Point2D> points
Táto metóda vráti zo zoznamu bodov najmenší ohraničujúci kruh. Volanie tejto metódy podnecuje volanie pomocnej rekurzívnej metódy minCircle, ktorá je opísaná nižšie.
2.4.2. minCircle
- Typ metódy:public static
- Návratová hodnota:Circle
- Parametre:
- int n
- Point2D[] p
- int m
- Point2D[] b
Táto metóda slúži na výpočet stredu a polomeru najmenšej kružnice, ktorá obsahuje body zo vstupného poľa bodov. Pri volaní z predchádzajúcej metódy minEnclosingCircle sa zavolá 4x, až sa v poslednom volaní zavolá metóda findCenterRadius s 3 bodmi tvoriacimi najmenší obklopujúci kruh.
2.4.3. findCenterRadius
- Typ metódy:public static
- Návratová hodnota:Circle
- Parametre:
- Point2D p1
- Point2D p2
- Point2D p3
Táto metóda na základe vstupných 3 bodov tvoriacich kruh vypočíta jeho stred a polomer. To sa počíta takto:
 Stred kruhu má teda tieto súradnice x a y. Polomer kruhu sa vypočíta ako (euklidovská) vzdialenosť jedného bodu z kružnice od stredu, tu sa používa bod p1. Nakoniec sa vráti kruh so známym stredom aj polomerom.
Stred kruhu má teda tieto súradnice x a y. Polomer kruhu sa vypočíta ako (euklidovská) vzdialenosť jedného bodu z kružnice od stredu, tu sa používa bod p1. Nakoniec sa vráti kruh so známym stredom aj polomerom.
2.5. sk.fiit.robocup.library.geometry.Point2D
- Typ triedy: public
- Premenné:
- private double x
- určuje x-ovú súradnicu
- private double y
- určuje y-ovú súradnicu
Táto trieda reprezentuje bod s dvoma súradnicami. Obsahuje konštruktor, ktorý ma 2 parametre, konkrétne double x a double y. Trieda obsahuje základné funkcie get a set pre vyššie spomínané premenné.
2.5.1. interpolate
- Typ metódy:public static
- Návratová hodnota:Point2D
Point2D from – začiatočný bod, Point2D to – koncový bod, double timelinePosition – premenná na posunutie
Táto metóda interpoluje dva body, teda zisťuje v podstate, kam sa posunie bod v určenom smere.
2.5.2. distance
- Typ metódy:public
- Návratová hodnota:double
- Parametre:
- Point2D p
Táto metóda zisťuje vzdialenosť medzi prvým a druhým bodom, pričom prvý bod je definovaný globálne (aké ma súradnice??).
2.5.3. toString
- Typ metódy:public
- Návratová hodnota: String
Metóda preťažuje klasickú metódu toString vo formáte „ Vector2 [x=“ x „, y=“ y „]“.
2.6. sk.fiit.robocup.library.geometry.Point3D
- Typ triedy: public
- Premenné:
- private double x
- určuje x-ovú súradnicu
- private double y
- určuje y-ovú súradnicu
- private double z
- určuje z-ovú súradnicu
Táto trieda reprezentuje bod s troma súradnicami. Obsahuje konštruktor, ktorý ma 3 parametre, konkrétne double x, double y a double z. Trieda obsahuje základné funkcie get a set pre vyššie spomínané premenné.
2.6.1. toString
- Typ metódy:public
- Návratová hodnota: String
Metóda preťažuje klasickú metódu toString vo formáte „ %1$.4f %2$.4f %3$.4f“, x, y, z„.
2.7. sk.fiit.robocup.library.geometry.Vector2D
- Typ triedy: public
- Premenné:
- private double x
- reprezentuje x-ovú súradnicu prvého bodu čiary
- private double y
- reprezentuje y-ovú súradnicu druhého bodu čiary
Táto trieda reprezentuje 2D vektor a definuje možné operácie s nimi. Obsahuje jeden prázdny konštruktor, jeden konštruktor s 2 vstupnými parametrami – double x, double y a jeden konštruktor s dvojicou súradníc. Trieda obsahuje základné funkcie get a set pre vyššie spomínané premenné.
2.7.1. angle
- Typ metódy:public
- Návratová hodnota:double
- Parametre: Vector2D v
Metóda vráti uhol, ktorý zvierajú 2 vektory, prostredníctvom príslušnej matematickej operácie.
2.7.2. equals
- Typ metódy:public
- Návratová hodnota: boolean
- Parametre: Object obj
Metóda porovná vstupný objekt s vektorom, pričom vráti true ak je identický alebo zhodný len s malou odchýlkou (0,01). V iných prípadoch vráti false.
2.8. sk.fiit.robocup.library.geometry.Vector3D
- Typ triedy:public
- Konštanty:
- private static final Vector 3D ZERO_VECTOR
- predstavuje nulový 3D vektor so zadefinovanými karteziánskymi súradnicami
- public static final Vector3D X_AXIS
- predstavuje 3D vektor so zadefinovanými karteziánskymi súradnicami, pričom x-ová súradnica je rovná 1
- public static final Vector3D Y_AXIS
- predstavuje 3D vektor so zadefinovanými karteziánskymi súradnicami, pričom y-ová súradnica je rovná 1
- public static final Vector3D Z_AXIS
- predstavuje 3D vektor so zadefinovanými karteziánskymi súradnicami, pričom z-ová súradnica je rovná 1
- Premenné:
- private double x
- x-ová súradnica v karteziánskej sústave
- private double y
- y-ová súradnica v karteziánskej sústave
- private double z
- z-ová súradnica v karteziánskej sústave
- private double r
- sférická premenná v jednotkách radiánov
- private double phi
- sférická premenná v jednotkách radiánov
- private double theta
- sférická premenná v jednotkách radiánov
Táto trieda reprezentuje 3D vektor a definuje možné operácie s nimi. Obsahuje jeden prázdny konštruktor, pričom je povedané, že vytvárať 3D vektor je možné len cez jednu z metód a nie priamo cez konštruktor. Trieda obsahuje základné metódy get a set pre vyššie spomínané premenné.
2.8.1. cartesian
- Typ metódy:public static
- Návratová hodnota: Vector3D
- Parametre:
- Point2D xy
- double z
Táto metóda vytvorí 3D vektor zo vstupného 2D bodu a tretej súradnice z, reprezentujúcej tretiu súradnicu v priestore.
2.8.2. cartesian
- Typ metódy:public static
- Návratová hodnota: Circle
- Parametre:
- double x
- double y
- double z
Táto metóda vytvorí 3D vektor zo vstupných súradníc v priestore, pomocou prepočtu karteziánskych súradníc na sférické.
2.8.3. calculateSpherical
- Typ metódy:public static
- Návratová hodnota: void
Táto metóda vypočíta sférické súradnice z karteziánskych súradníc.
2.8.4. calculateCartesian
- Typ metódy:public static
- Návratová hodnota: void
Táto metóda vypočíta karteziánske súradnice zo sférických súradníc.
2.8.5. add - metódy
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre:double
Tieto metódy pripočítavajú dĺžku ku konkrétnym reprezentáciám (karteziánska/sférická) súradníc, resp. pripočítanie celého vektora.
2.8.6. substract
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre:Vector3D anotherVector
Táto metóda odčíta vstupný vektor od globálne definovaného vektora a vráti výsledný vektor.
2.8.7. multiply
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre:Vector3D anotherVector
Táto metóda vynásobí súradnice vstupného vektoru a súradnice globálne definovaného vektora a vráti výsledný vektor.
2.8.8. divide
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre:Vector3D anotherVector
Táto metóda vydelí súradnice vstupného vektoru a súradnice globálne definovaného vektora a vráti výsledný vektor.
2.8.9. negate
- Typ metódy:public
- Návratová hodnota: Vector3D
Táto metóda otočí globálne definovaný vektor do opačného smeru a vráti výsledný vektor.
2.8.10. toUnitVector
- Typ metódy:public
- Návratová hodnota: Vector3D
Táto metóda vráti vektor dĺžky 1.
2.8.11. rotateOverSúradnica - metódy
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre: double súradnica
Tieto metódy vracajú vektory, ktoré boli otočené okolo konkrétnej súradnicovej osi.
2.8.12. crossProduct
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre: Vector3D anotherVector
Táto metóda vracia vektorový súčin 2 vektorov vo výslednom vektore.
2.8.13. dotProduct
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre: Vector3D anotherVector
Táto metóda vracia skalárny súčin 2 vektorov vo výslednom vektore.
2.8.14. asPoint3D
- Typ metódy:public
- Návratová hodnota: Point3D
Táto metóda vráti definovaný vektor ako (počiatočný) bod s 3 súradnicami.
2.8.15. getXYDistanceFrom
- Typ metódy:public
- Návratová hodnota: double
- Parametre: Vector3D b
Táto metóda vráti vzdialenosť vstupného vektora od definovaného vektora.
2.8.16. toString
- Typ metódy:public
- Návratová hodnota: String
Metóda preťažuje klasickú metódu toString vo formáte “ „x, y, z: [%.2f, %.2f, %.2f] r, phi, theta: [%.2f, %.2f, %.2f]“, x, y, z, r, phi, theta„.
2.8.17. equals
- Typ metódy:public
- Návratová hodnota: boolean
- Parametre: Object obj
Metóda porovná vstupný objekt s vektorom, pričom vráti true, ak je identický alebo zhodný len s malou odchýlkou (0,01). V iných prípadoch vráti false.
2.8.18. normalize
- Typ metódy:public
- Návratová hodnota: Vector3D
Metóda vráti normálový vektor.
2.8.19. rotateOver
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre:
- Vector3D axis
- double angleInRad
Metóda vráti vektor, ktorý je otočený okolo vstupného vektora axis vo vstupnom uhle angleInRad.
2.8.20. flatten
- Typ metódy:public
- Návratová hodnota: Vector3D
Metóda vráti vektor, pričom vynuluje jeho z-ovú (priestorovú) súradnicu.
2.9. Kalmanov filter
Kalmanov filter je algoritmus, ktorý z dát zaťaženými nepresnosťami a šumom, odhaduje neznáme hodnoty premenných. Využíva k tomu nielen naposledy namerané dáta a model systému, ale tiež vektor údajov o predchádzajúcom stave systému. Kalmanov filter je široko využívaný pre spracovanie signálov, navigáciu a iné úlohy.
Kalmanov filter hľadá optimálny faktor zmeny pre nasledujúci stav meranej veličiny. Vychádza sa z predpokladu, že nevieme presne veličinu zmerať ani odhadnúť so 100% istotou. Predpoklad je mať buď linearizovaný model správania, alebo v pokročilej verzii algoritmu sa meraný model linearizuje. Do úvahy sa berú tiež predchádzajúce stavy a ich odhady.
podrobnejšie info tu:
http://bilgin.esme.org/BitsAndBytes/KalmanFilterforDummies
https://www.cl.cam.ac.uk/~rmf25/papers/Understanding%20the%20Basis%20of%20the%20Kalman%20Filter.pdf
2.10. sk.fiit.robocup.library.math.KalmanForVariable
- Typ triedy:public
- Premenné:
- private double x_est_last = Double.NEGATIVE_INFINITY
- predchádzaujúci odhada nastavený na záporné nekonečno
- private double P_last
- private double Q
- kovariant chyby merania
- private double R
- kovariant meranej veličiny
- private double K
- Kalman gain
- private double P
- predchádzajúci odhad
- private double P_temp
- private double x_temp_est
- private double x_est
- výstupný odhad X veličiny podľa Kalmanovho algoritmu
Kalman filter tracing a single observable variable
2.10.1. update
- Typ metódy:public
- Návratová hodnota: double
- Parametre: double observed
Metóda pre update pôvodnej hodnoty zo správy pomocou Kalmanovho algoritmu. Q a R sú konštanty pre filter sa berú z sk.fiit.jim.Settings a tie sa získavajú v praxi len experimentom.
2.11. sk.fiit.robocup.library.math.KalmanForVector
- Typ triedy:public
- Premenné:
- private KalmanForVariable x
- x súradnica
- private KalmanForVariable y
- y súradnica
- private KalmanForVariable z
- z súradnica
Trieda pre 3D vektor miesto jedného bodu/hodnoty. Metóda update() spracováva 3 súradnice.
2.11.1. update
- Typ metódy:public
- Návratová hodnota: Vector3D
- Parametre: Vector3D observed
Metóda pre optimalizáciu 3D vektora pomocou Kalmanovho filtra. Aktualizujú sa hodnoty postupne pre x, y a z súradnice a vracia sa výsledný 3D vektor.
2.12. sk.fiit.jim.agent.models.KalmanAdjuster
- Typ triedy:public
- ImplementujeParsedDataObserver
Trieda upravuje sledované koordináty lopty a zástaviek agentom pomocou Kalmanovho filtra
Snaha je znížiť zašumenie týmto spôsobom pred ďalšími výpočtami. V projekte je implementovaný ako observer KalmanAdjuster, ktorý je naviazaný na prijatú správu zo servera. Implementované je to spôsobom, že sa automaticky optimalizuje/odhaduje poloha lopty a pevné rohy ihriska – vlajky.
2.12.1. processNewServerMessage
- Typ metódy:public
- Návratová hodnota: void
- Parametre: ParsedData data
Public metóda pre spracovania dát z novej správy zo servera. Spúšťa sa optimalizácia zašumenia polohy lopty na ihrisku a poloha rohových bodov.
2.12.2. adjustBallPosition
- Typ metódy: private
- Návratová hodnota: void
- Parametre: ParsedData data
Aplikuje Kalmanov filter pre polohu lopty, ak jej posledná videná poloha je staršia než 250ms. Výsledná hodnota sa ukladá späť do správy zo servera.
2.12.3. adjustFixedPointsPosition
- Typ metódy: private
- Návratová hodnota: void
- Parametre: Map<FixedObject, Vector3D> fixedObjects
Aplikuje Kalmanov filter pre pevný bod na mape. Vstupný parameter je hash mapa objektov typu ihrisková vlajka a vektor 3D súradníc ich polohy. Spracované hodnoty sa vracajú späť do spracovanej správy zo servera.
2.12.4. freshKalman
- Typ metódy: private
- Návratová hodnota: KalmanForVector
Konštanty pre filter sa berú z sk.fiit.jim.Settings a vracia objekt KalmanForVector().
2.12.5. isObsolete
- Typ metódy: private
- Návratová hodnota: boolean
- Parametre: double when
Metóda vracajúca true, ak je spracovaná správa zo servera staršia než 250ms. Porovnáva sa čas when s aktuálnym časom simulácie.
2.13. sk.fiit.robocup.library.math.MathExpressionEvaluator
- Typ triedy: public
- Premenné: private final String expression - reťazec výrazu
Transformuje matematický výraz vo formáte reťazca do číselného výsledku
Príkald: new{@link MathExpressionEvaluator}(„7+5“).getInt() == 12
2.13.1. getInt
- Typ metódy: public
- Návratová hodnota: int
Vracia integer hodnotu reťazce expression. Vychádza z návratovej hodnoty getDouble(), ktorú pretypuje.
2.13.2. getDouble
- Typ metódy: public
- Návratová hodnota: double
Vyhodnocuje reťazec expression ako double hodnotu.
2.14. sk.fiit.robocup.library.math.TransformationMatrix
- Typ triedy: public
- Premenné:
- private double values
- private static TransformationMatrix identity
Trieda reprezentujúca operácie na transformáciu trojrozmernej projekcie. Využíva sa to v TestFrameworku pri vykresľovaní viacerých komponentov na 2D plochu.
2.14.1. toString
- Typ metódy: public
- Návratová hodnota: String
Preťažená metóda toString(), ktorá upravuje výstupný formát double čísel do [ ] a na pevný počet miest.
2.14.2. compareWith
- Typ metódy: public
- Návratová hodnota: boolean
- Parametre: TransformationMatrix matrix
Porovnávanie dvoch matíc medzi sebou, vracia true, ak sú matice zhodné, inak vracia false.
2.14.3. multiply
- Typ metódy: public
- Návratová hodnota: TransformationMatrix
- Parametre: TransformationMatrix matrix
Násobenie dvoch báz ( matíc ) a vracia novú vypočítanú maticu.
2.14.4. getTranslation
- Typ metódy: public
- Návratová hodnota: Vector3D
Výpočet posunu ako 3D vektor.
2.14.5. getRotation
- Typ metódy: public
- Návratová hodnota: Vector3D
Výpočet rotácie ako 3D vektor.