Table of Contents
KylinSky3D
Tento tím vznikol na Čínskej univerzite Hohai. Ich cieľom je vyvinúť výkonný a rozšíriteľný zdrojový kód agenta. Taktiež si dali za úlohu dosiahnuť stabilnú a autonómnu chôdzu robota.
Architektúra agenta
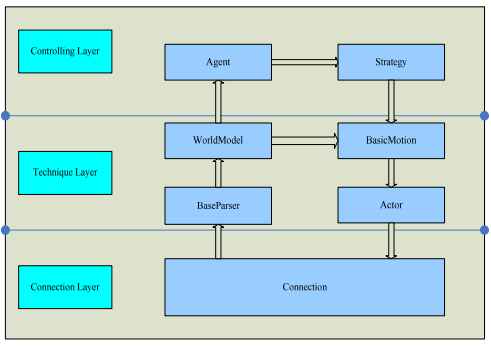
Achitektúra agenta (Obrázok 18) tímu KylinSky3D sa skladá z troch hlavných vrstiev, ktoré spolu navzájom spolupracujú. Ide o vrstvu pripojenia, technickú vrstvu a kontrolnú vrstvu. Vrstva pripojenia sa stará o komunikáciu agenta so serverom. Technická vrstva tvorí akési jadro a skladá sa zo štyroch častí: WorldModel, BasicMotion, BaseParser a Actor. Kontrolná vrstva obsahuje stratégie agenta pri hre.
Model sveta
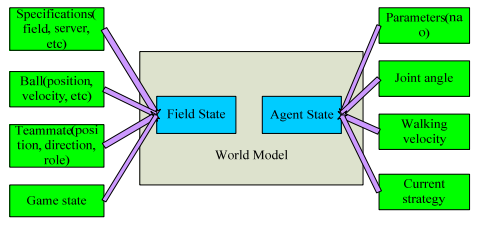
Model sveta (Obrázok 19) obsahuje statické a dynamické informácie o hre, stavoch ihriska, správach od iných agentov a strategické informácie. Tím rozdelil tento model na dve základné logické časti: stav ihriska a stav hráča. Stav ihriska obsahuje napríklad informácie o jeho veľkosti, polohy rohových zástaviek, polohy lopty, polohy spoluhráčov alebo stav hry. Stav agenta obsahuje informácie o parametroch robota, uhle kĺbov, rýchlosti chôdze a aktuálnej hernej stratégii.
Chôdza agenta
Tím KylinSky 3D sa vo veľkej miere zameral na stabilnú a zároveň dynamickú chôdzu. Vytvorili preto prístup, ktorý nazvali offlline plánovanie a online revízia. Znamená to toľko, že pred začatím pohybu si agent cestu naplánuje a počas neho ju už iba upravuje vzhľadom na vzniknuté okolnosti. Určili si dokonca štyri predpoklady, pre chôdzu:
- trup robota je orientovaný vždy zvislo vzhľadom na zem
- chodidlá sú orientované vždy vodorovne vzhľadom na zem
- pri prvom kroku je ľavá noha podporná a pravá vykračujúca
- trajektórie ľavej a pravej nohy sú rovnaké, keďže chôdza je periodická činnosť
Pre potreby chôdze boli použité viaceré zložité kinematícké rovnice. Robot tohto tímu pri nej dokonca používa aj ruky, čím zvyšuje stabilitu pohybu.