Table of Contents
Kouretes
Tím Kouretes vznikol vo Februári 2006. Spočiatku sa tím zameriaval výhradne na „štvornohú ligu“ (the four-legged league), ale neskôr svoje aktivity rozšíril na simulačnú ligu (the simulation league). V súčasnosti je tím aktívny v Standard Platform League., V roku 2008 zahájil tím vývoj kódu pre novú platformu (Nao robot) v kombinácii C++ a Ruby pre reálneho robota, C# pre simulovaného robota v MSRS (Microsoft Robotics Studio) a Java pre simulovaného robota Webots.
- 3. miesto v Nao lige
- 1. miesto v MSRS simulácii
- Najlepšia osmička vo Webots RobotStadium súťaži
V roku 2009 sa tím zameral výhradne na Nao robotov a vyvinul nové moduly používajúce C# a Python.
- Účasť na SPL RoboCup German Open 2009
- Účasť na súťaži RoboCup 2009 v Rakúsku
- 6. miesto vo Webots simulácii
V roku 2010 vyvinuli nové moduly pre kontrolu pohybov, komunikácie, rozpoznávaniu objektov, seba-lokalizáciu, vyhýbanie sa prekážkam a tímový kód bol zverejnený na úložisku Github.
- Účasť na prvej súťaži RoboCup Mediterranean Open v Ríme
- Účasť na RoboCup 2010 v Singapure.
- Hostili prvý oficiálny SPL turnaj v Grécku (pozvané 3 tímy)
V roku 2011 boli vyvinuté ďalšie nové moduly.
- Spojenie s anglickým tímom Noxious pre RoboCup 2011
- 1 výhra a 3 prehry
- 2. miesto na SPL Open Challenge súťaži
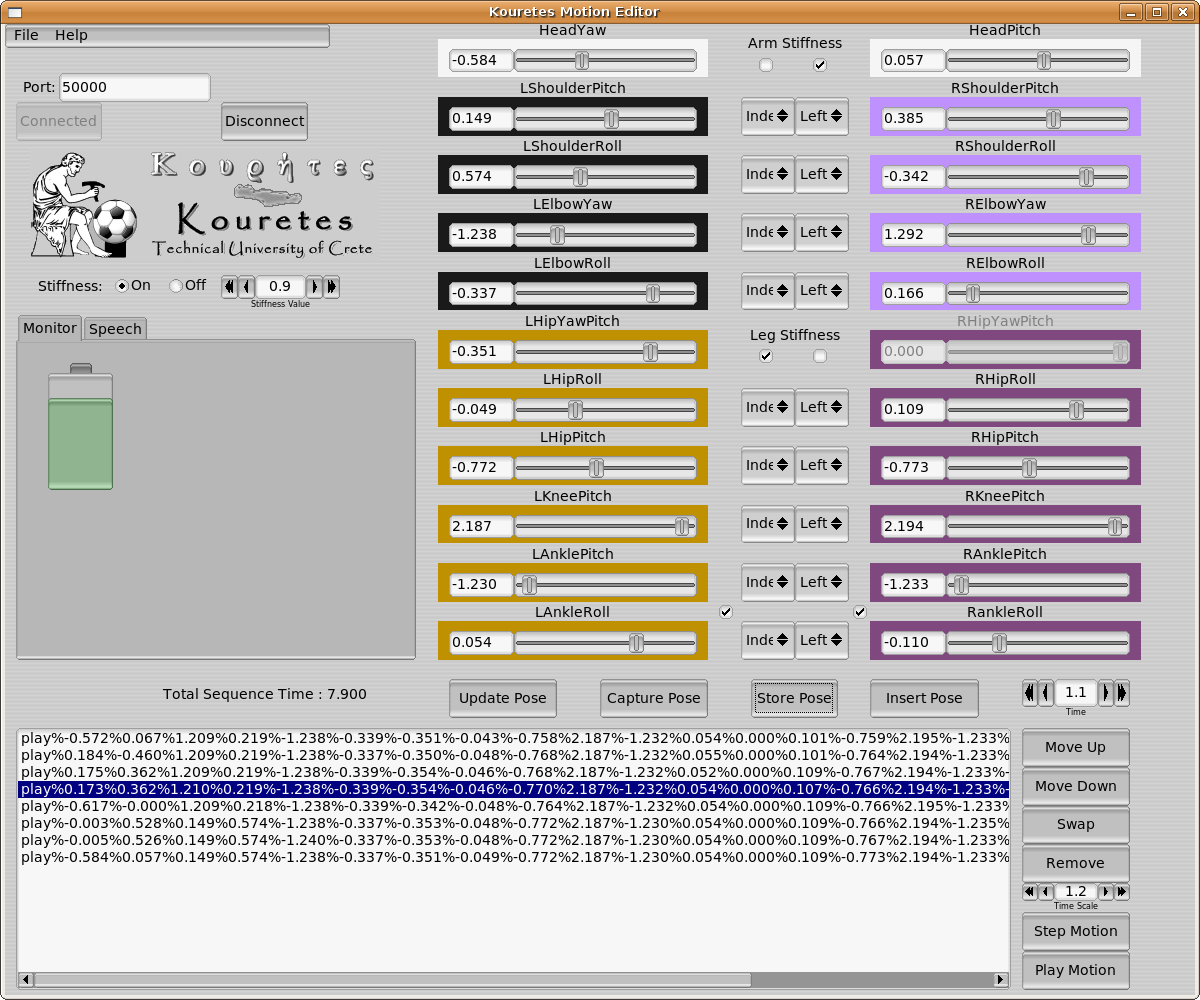
Komplexné pohybové vzorky
Kouretes Motion Editor (KME) je interaktívny nástroj pre vytváranie:
- komplexných pohybov,
- pohybov pomocou hýbania samotným robotom,
- zrkadlových / vzájomných pohybov
Videnie
Kouretes Color Classifier (KC2) je grafický nástroj pre označovanie objektov a učenie sa pomocou farebnej segmentácie. Ako je vidieť na obrázku, sú označkované len objekty bránky, lopty a ihriska, ktoré sú následne prevedené do 3D priestoru.

Video ukážka
Lokalizácia
Kouretes Localization (KLoc) je plne funkcionálny a parametrický modul pre robotovu sebalokalizáciu. Vyvinuli jednoduchú metódu pre rýchle učenie v rôznych situáciách. Ukážka systému je v nasledovnom videu (systém (asi) vypočítava v reálnom čase a za podmienky, že robot vidí nejakú tyč, vzdialenosť robota od nej)

Učenie sa
Využili podporné učenie pre naučenie sa pohybu kopu počas státia na jednej nohe bez pádu. V prostredí Webots simulator vykonali 150 opakovaní, po ktorých sa postupne naučil tento pohyb, ktorý bol pri poslednom pokuse relatívne plynulý a synchronizovaný.

Tímová koordinácia
Hlavným cieľom RoboCupu je zápas medzi robotmi a skutočnými hráčmi, no stratégia spolu s taktikou a formáciami nie je dostatočne preskúmaná. Tím Kouretes sa na základe stratégií hráčov v reálnom futbale rozhodli implementovať stratégiu robotického futbalu.
Každý hráč má svoju presne definovanú rolu - doteraz definovali a implementovali 4 taktiky:
- Pasívna obrana
- Stiahnutá obrana
- Prechod do útoku
- Protiútok
V každej taktike sú 4 roly:
- útočník
- stredopoliar
- obranca
- brankár
Každá rola v každej taktike je implementovaná za pomoci Plánov Petriho sietí. Tímová taktika a role hráčov sa vyberajú v reálnom čase na základe aktuálnej pozície lopty na ihrisku a polohy každého hráča. Výsledkom je zlepšenie tímovej hry s lepším pokrytím hracej plochy hráčmi. Nasledujúci obrázok zobrazuje plán pre rolu “útočník” v taktike “protiútok”.

Nasledujúce videá ukazujú taktiku stiahnutej obrany:
Záver
Tím Kouretes sa neumiestňuje na popredných priečkach výsledkových listín svetových súťaží, no namiesto toho vsadil na kvalitnú prípravu, ktorá spočíva na vytváraní vlastných modulov/nástrojov na vytváranie pohybov robota, jeho učenie, sebalokalizáciu, rozpoznávanie objektov a tvorbe tímovej taktiky.