SEU-RedSun
Tento čínsky tím vznikol v roku 2005 na Southeast university Nanjing. Už krátko po svojom vzniku sa zúčastňovali medzinárodných súťaží v RoboCupe 3D a v roku 2009 dokonca vyhrali turnaje Iran Open a Robocup Graz. Ich cieľom je vyvinúť agenta s dôrazom na znovupoužitie a na správanie čo najviac podobné ľudskému.
Architektúra agenta
Vzhľadom na časté zmeny a aktualizácie serveru SimSpark sa členovia tímu rozhodli, že svojho hráča spravia čo najflexibilnejšieho. Model hráča vytvorili na základe architektúry prídavných modulov čo znamená, striktne vrstvenú štruktúru hráča so singleton modulmi. Takto vedia na zmeny reagovať jednoducho zmenou alebo nahradením niektorého modulu.
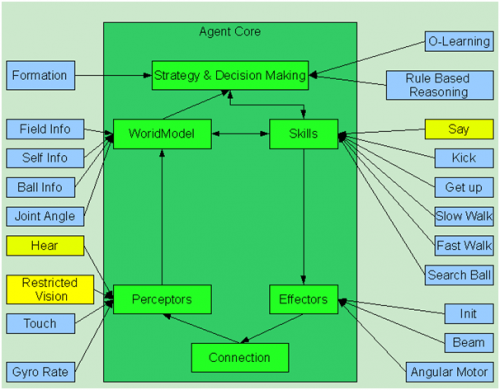
Na obrázku 14 je zobrazená architektúra agenta tohto tímu. Zelenou farbou sú označené moduly patriace do jadra agenta. Žltou a modrou farbou zas prídavné moduly. Chôdza a kopanie do lopty Aby bola hra robota čo najviac podobná hre človeka, je nutné zdokonaliť niektoré jeho pohyby ako chôdza, vstávanie alebo kopanie do lopty. Napríklad samotná chôdza by mala byť plynulá a nezávislá od momentálnej orientácie hráča. Toto sa čínskemu tímu podarilo dosiahnuť implementovaním takzvanej viacsmerovej chôdze. Jedná sa o schopnosť agenta meniť smer chôdze bez nutnosti zastavenia a natočenia. Vzniká tak plynulý pohyb, ktorý vie v reálnom čase reagovať na vynútené zmeny smeru.
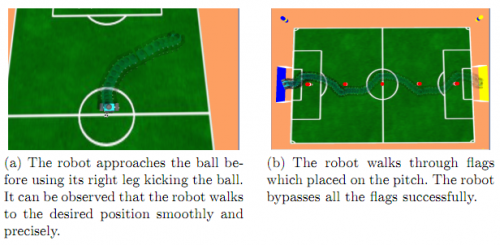
Tímu sa tiež podarilo implementovať vylepšený spôsob kopania do lopty. Ich agent je schopný kopnúť do lopty bez ohľadu na jej pozíciu vzhľadom na hráča. Vie teda z každej časti ihriska vystreliť na bránu. Neoddeliteľnou súčasťou schopností agenta je tiež vstávanie zo zeme. Tímu sa podarilo nasadiť veľmi rýchle vstávanie na úrovni dvoch sekúnd.
Racionálna nahrávka do určitej oblasti
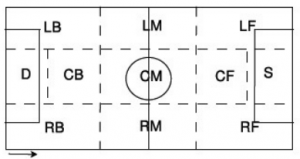
Veľmi zaujímavý je spôsob, akým sa pristupuje k nahrávkam. Namiesto implementácie systému, ktorý pošle loptu presne na určité miesto, bol vytvorený systém, ktorý pošle loptu do určitej oblasti. Znamená to rapídne zníženie množstva výpočtov a teda zvýšenie efektivity. Tím rozdelil ihrisko na 11 oblastí (Obrázok 16).
Schopnosti pri hre
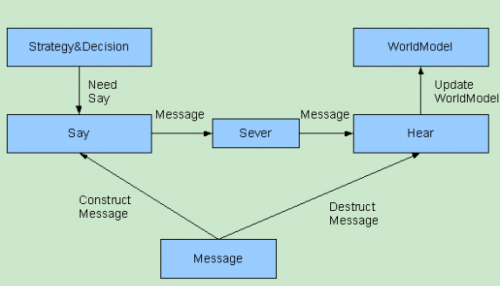
Aby bol agent schopný lokalizovať vlastnú polohu pri hre potrebuje na to vidieť tri rohové zástavky. Počas zápasu však môže nastať situácia, že zástavky nie sú vidieť, preto musí agent otáčať hlavou. To ale trvá veľmi dlho. Preto sa používa rozdelenie ihriska na oblasti, popísane v kapitole vyššie, vďaka ktorému agent vie kam má otočiť hlavu, aby čo najrýchlejšie lokalizoval zástavky a loptu. Implementovaný je tiež algoritmus na neustále sledovanie dôležitých bodov na ihrisku, vďaka čomu vie agent oveľa efektívnejšie reagovať na hru. Sleduje takto napríklad loptu a rohové zástavky. Pri hre šiestich proti šiestim sa komunikácia medzi agentmi stáva čoraz dôležitejšou. Preto bol vytvorený komunikačný model (Obrázok 17), pomocou ktorého sa agenti medzi sebou dorozumievajú. Oficiálny limit na jednu správu je 20 bytov.